Publications





efference copy is necessary for sensory attenuation
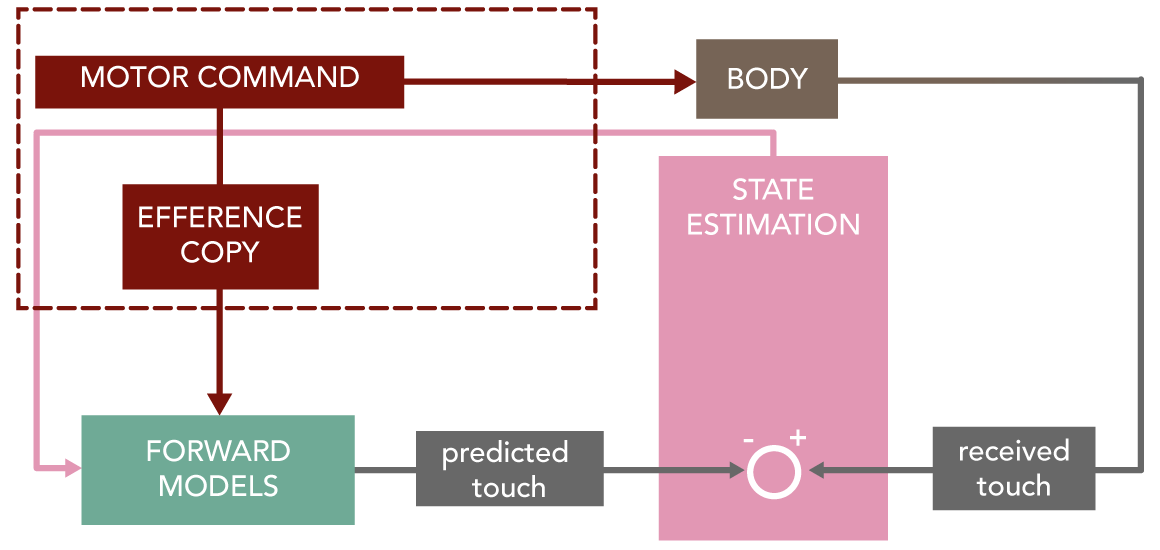
Self-generated touch feels less intense than external touch of the same intensity. According to theory, this is because the brain predicts and attenuates the somatosensory consequences of our movements using a copy of the motor command, i.e., the efference copy. However, whether the efference copy is necessary for this somatosensory attenuation is unclear. Alternatively, a predictable contact of two body parts could be sufficient. Here we quantified the attenuation of touch applied on the participants’ left index finger when the touch was triggered by the active or passive movement of the right index finger and when it was externally generated. We observed attenuation only when the touch was triggered by the participants’ active movement. In contrast, during the passive movement, the touch was perceived to be as strong as when the touch was externally triggered. Our results suggest that the efference copy is necessary for the attenuation of self-generated touch.
>> Kilteni K, Engeler P, Ehrsson HH. Efference copy is necessary for the attenuation of self-generated touch. iscience. 2020 Feb 21;23(2):100843.




Corticocerebellar connectivity as a neurobiological basis of sensory attenuation
Since the early 1970s, numerous behavioral studies have shown that self-generated touch feels less intense and less ticklish than the same touch applied externally. Computational motor control theories have suggested that cerebellar internal models predict the somatosensory consequences of our movements and that these predictions attenuate the perception of the actual touch. Despite this influential theoretical framework, little is known about the neural basis of this predictive attenuation. This is due to the limited number of neuroimaging studies, the presence of conflicting results about the role and the location of cerebellar activity, and the lack of behavioral measures accompanying the neural findings. Here, we combined psychophysics with fMRI to detect the neural processes underlying somatosensory attenuation in male and female healthy human participants. Activity in bilateral secondary somatosensory areas was attenuated when the touch was presented during a self-generated movement (self-generated touch) than in the absence of movement (external touch). An additional attenuation effect was observed in the cerebellum that is ipsilateral to the passive limb receiving the touch. Importantly, we further found that the degree of functional connectivity between the ipsilateral cerebellum and the contralateral primary and bilateral secondary somatosensory areas was linearly and positively related to the degree of behaviorally assessed attenuation; that is, the more participants perceptually attenuated their self-generated touches, the stronger this corticocerebellar coupling. Collectively, these results suggest that the ipsilateral cerebellum is fundamental in predicting self-generated touch and that this structure implements somatosensory attenuation via its functional connectivity with somatosensory areas.
>> Kilteni K, Ehrsson HH. Functional connectivity between the cerebellum and somatosensory areas implements the attenuation of self-generated touch. Journal of Neuroscience. 2020 Jan 22;40(4):894-906.
recalibrating sensory attenuation through exposure to new sensorimotor delays
Self-generated touch feels less intense and less ticklish than identical externally generated touch. This somatosensory attenuation occurs because the brain predicts the tactile consequences of our self-generated movements. To produce attenuation, the tactile predictions need to be time-locked to the movement, but how the brain maintains this temporal tuning remains unknown. Using a bimanual self-touch paradigm, we demonstrate that people can rapidly unlearn to attenuate touch immediately after their movement and learn to attenuate delayed touch instead, after repeated exposure to a systematic delay between the movement and the resulting touch. The magnitudes of the unlearning and learning effects are correlated and dependent on the number of trials that participants have been exposed to. We further show that delayed touches feel less ticklish and non-delayed touches more ticklish after exposure to the systematic delay. These findings demonstrate that the attenuation of self-generated touch is adaptive.
>> Kilteni K, Houborg C, Ehrsson HH. Rapid learning and unlearning of predicted sensory delays in self-generated touch. eLife. 2019;8.








imagined movements produce sensory attenuation
Research on motor imagery has identified many similarities between imagined and executed actions at the behavioral, physiological and neural levels, thus supporting their “functional equivalence”. In contrast, little is known about their possible “computational equivalence”—specifically, whether the brain’s internal forward models predict the sensory consequences of imagined movements as they do for overt movements. Here, we address this question by assessing whether imagined self-generated touch produces an attenuation of real tactile sensations. Previous studies have shown that self-touch feels less intense compared with touch of external origin because the forward models predict the tactile feedback based on a copy of the motor command. Our results demonstrate that imagined self-touch is attenuated just as real self-touch is and that the imagery-induced attenuation follows the same spatiotemporal principles as does the attenuation elicited by overt movements. We conclude that motor imagery recruits the forward models to predict the sensory consequences of imagined movements.
>> Kilteni K, Andersson BJ, Houborg C, Ehrsson HH. Motor imagery involves predicting the sensory consequences of the imagined movement. Nature Communications. 2018 Apr 24;9(1):1-9.
Feeling a rubber hand as your own hand





Self-perception depends on the brain’s abilities to differentiate our body from the environment and to distinguish between the sensations generated as a consequence of voluntary movement and those arising from events in the external world. The first process refers to the sense of ownership of our body and relies on the dynamic integration of multisensory (afferent) signals. The second process depends on internal forward models that use (efferent) information from our motor commands to predict and attenuate the sensory consequences of our movements. However, the relationship between body ownership and sensory attenuation driven by the forward models remains unknown. To address this issue, we combined the rubber hand illusion, which allows experimental manipulation of body ownership, and the force-matching paradigm, which allows psychophysical quantification of somatosensory attenuation. We found that a rubber right hand pressing on the left index finger produced somatosensory attenuation but only when the model hand felt like one’s own (illusory self-touch); reversely, the attenuation that was expected to occur during actual self-touch with the real hands was reduced when the participants simultaneously experienced ownership of a rubber right hand that was placed at a distance from their left hand. These results demonstrate that the sense of body ownership determines somatosensory attenuation. From a theoretical perspective, our results are important because they suggest that body ownership updates the internal representation of body state that provides the input to the forward model generating sensory predictions during voluntary action.
>> Kilteni K, Ehrsson HH. Body ownership determines the attenuation of self-generated tactile sensations. Proceedings of the National Academy of Sciences. 2017 Aug 1;114(31):8426-31.
handheld tools attenuate self-touch








Human survival requires quick and accurate movements, both with and without tools. To overcome the sensorimotor delays and noise, the brain uses internal forward models to predict the sensory consequences of an action. Here, we investigated whether these sensory predictions are computed similarly for actions involving hand-held tools and natural hand movements. We hypothesized that the predictive attenuation of touch observed when touching one hand with the other would also be observed for touches applied with a hand-held tool. We first show that when touch is applied to the left index finger with the right index finger, the perceived force sensation is attenuated, only when the fingers are aligned in a manner that simulates direct physical contact and not when a distance of 25 cm is introduced between the hands. We then show that touch applied to the left index finger with a tool held in the right hand at a distance of 25 cm produces full sensory attenuation, similar to direct finger-to-finger contact. Finally, we show that touch is attenuated only when the tip of the tool is aligned with the receiving left index finger and not when the tip is placed at a distance of 25 cm. Collectively, these results suggest that tool use and natural limb movements share the same computational mechanism for sensory predictions. We submit that the brain uses effector-independent forward models: touch is predicted based on the anticipated position of the current effector (i.e., the tip of the tool) rather than the body part per se.
>> Kilteni K, Ehrsson HH. Sensorimotor predictions and tool use: Hand-held tools attenuate self-touch. Cognition. 2017 Aug 1;165:1-9.